Resilient cooperation and perception for multi-agent systems in adversarial settings
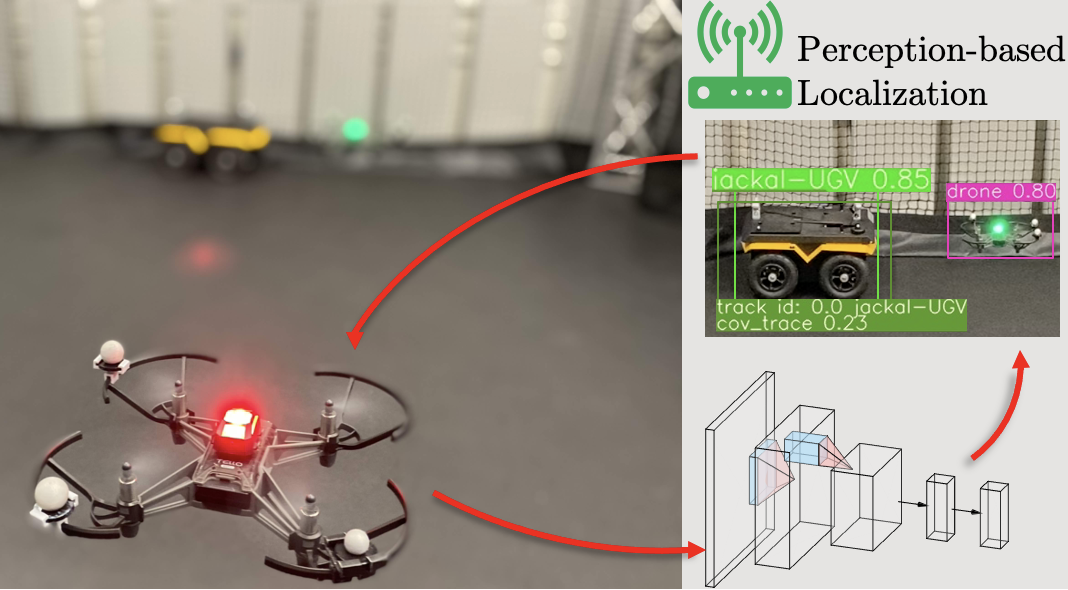
Multi-agent systems, such as multi-robot systems or vehicle platoons, rely on wireless communication and perceptual sensing modalities that are inherently vulnerable to adversarial perturbations in exchanged information. These adversaries, which can be stealthy and difficult to detect preemptively, compromise system stability and degrade data availability. In this research, we characterize these adversarial vulnerabilities using graph-theoretic and control-theoretic conditions. We then leverage information redundancy and conformity to network-level dynamics to design distributed, decentralized frameworks capable of detecting and filtering adversarial data and non-cooperative agents (robots). This approach enables resilient decision-making, information consensus, and cooperation of multi-agent system.
Publication
Bahrami, R. and Jafarnejadsani, H. (IEEE TCNS 2024),
[IEEE
Xplore],
[ arXiv],
[ GitHub]
Distributed Detection of Adversarial Attacks for Resilient Cooperation of
Multi-Robot Systems with Intermittent Communication.
Bahrami, R. and Jafarnejadsani, H. (IEEE ICUAS 2025),
[IEEE
Xplore],
[ arXiv],
[ GitHub]
Multi-Robot Coordination with Adversarial Perception.
The 2025 International Conference on Unmanned Aircraft Systems (ICUAS),
Charlotte, NC, USA. May, 2025.
Bahrami, R. and Jafarnejadsani, H. (IEEE ICUAS 2022),
[IEEE
Xplore],
[ arXiv],
[ GitHub]
Detection of Stealthy Adversaries for Networked Unmanned Aerial
Vehicles.
The 2022 International Conference on Unmanned Aircraft Systems (ICUAS),
Dubrovnik,
Croatia. June, 2022.
Bahrami, R. and Jafarnejadsani, H. (IEEE CDC 2021),
[IEEE
Xplore],
[ arXiv]
Privacy-Preserving Stealthy Attack Detection in Multi-Agent Control
Systems.
The 60th IEEE conference on Decision and Control, Austin, Texas, USA.
December, 2021.
Bio-inspired approach for adaptive monitoring and fault-tolerant control of electro-hydraulic actuators
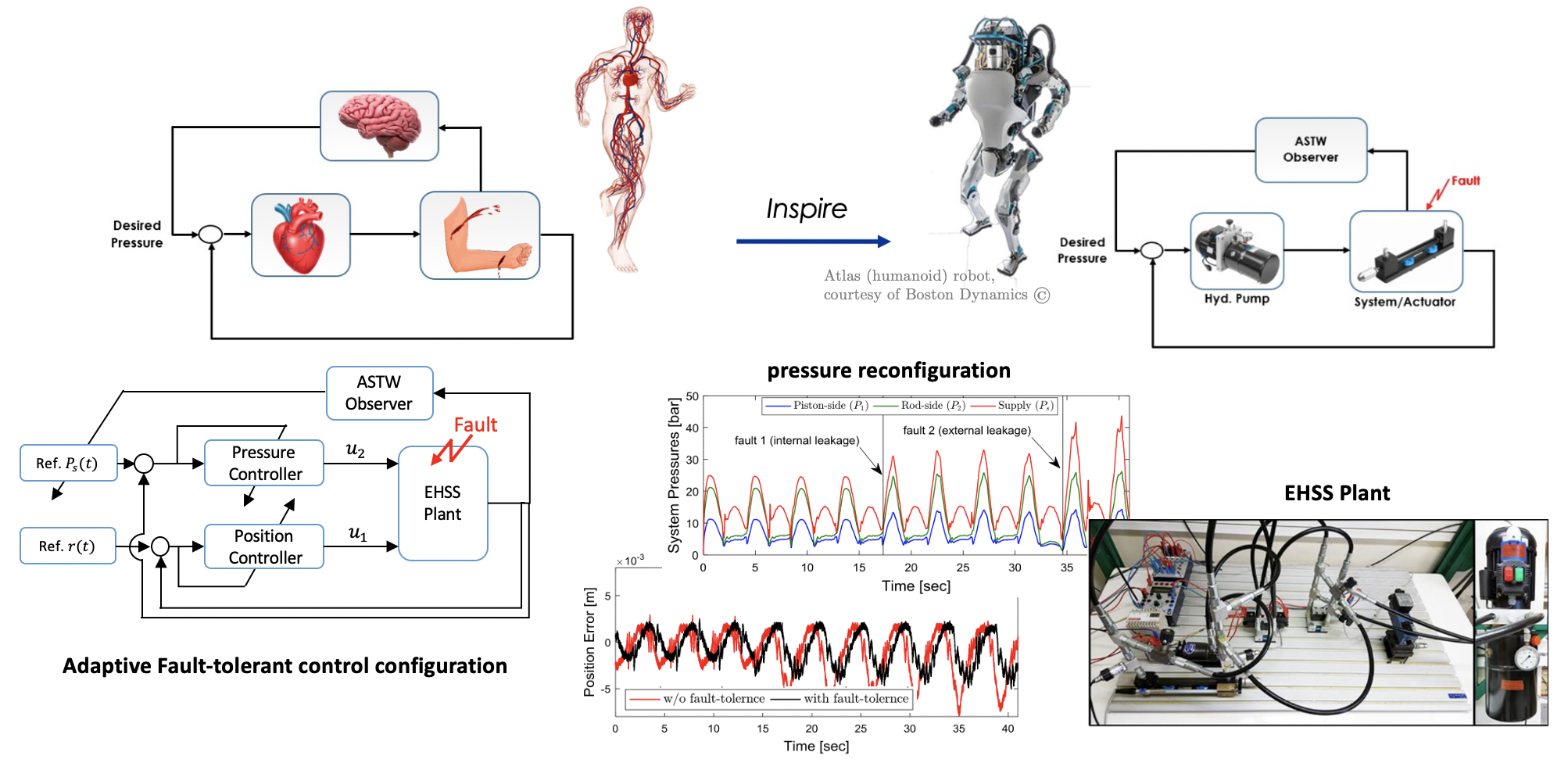
The human body regulates blood flow and pressure through feedback mechanisms that help
maintain stable hemodynamic conditions. For example, in cases of acute bleeding, blood
pressure drops due to a loss of blood volume. In response, a compensatory feedback
mechanism detects the drop and triggers reflex tachycardia—a physiological response that
increases heart rate to help offset the pressure loss.
Inspired by such physiological feedback mechanisms, we propose a reconfigurable,
fault-tolerant control and monitoring framework for electro-hydraulic systems to address
performance degradation, particularly pressure drops caused by leakage faults. The
framework incorporates two concurrent feedback mechanisms designed to maintain system
performance and stability under faulty conditions.
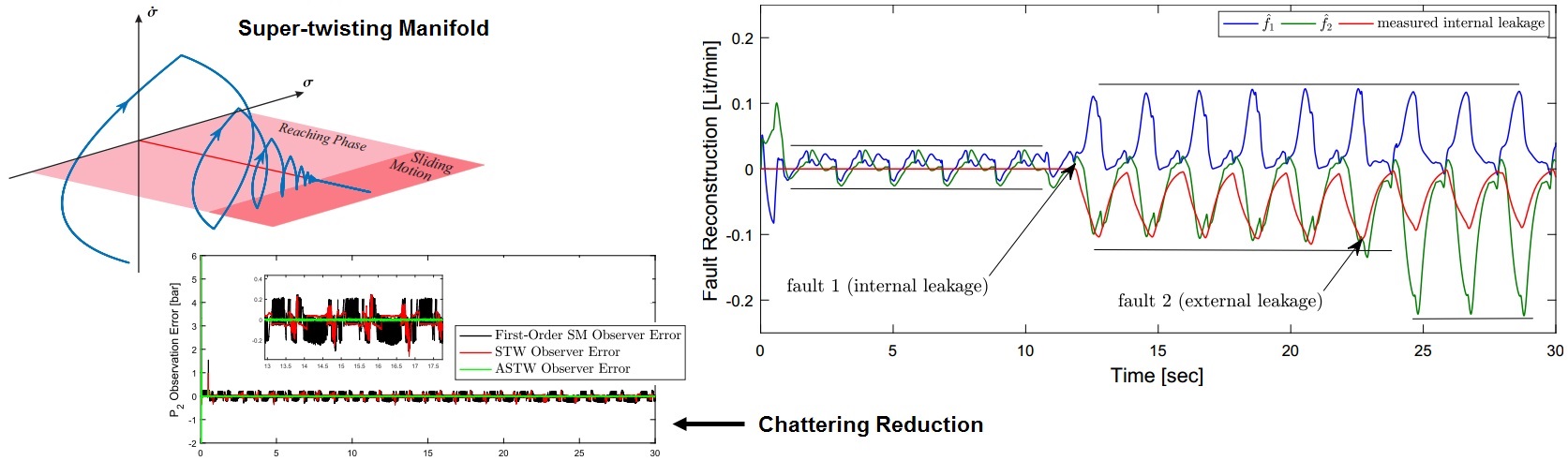
First, an adaptive monitoring algorithm detects pressure drops and reconstructs the
underlying leakage faults responsible for performance degradation. Then, the adaptive
feedback loops leverage the signals from the monitoring algorithm to regulate the system's
supply pressure and adjust the actuator control algorithm accordingly. These adaptive
feedback-control strategies enable resilience and fault tolerance in the system.
Publication
R. Bahrami, M. Naraghi, M. Zareinejad. (Elsevier ISA transactions,
2018),
[ScienceDirect],
[ arXiv]
"Adaptive super-twisting observer for fault reconstruction in
electro-hydraulic systems."
R. Bahrami, and M. Zareinejad,
"Adaptive higher-order sliding mode observer for a class of nonlinear
systems", [Part of M.S. thesis]
[Request]
R. Bahrami, and M. Zareinejad.
"Bio-inspired fault-tolerant control in hydraulic actuators", [Part of
M.S. thesis]
[Request]
A bio-inspired approach for increased efficiency of servo actuators through a switching control configuration
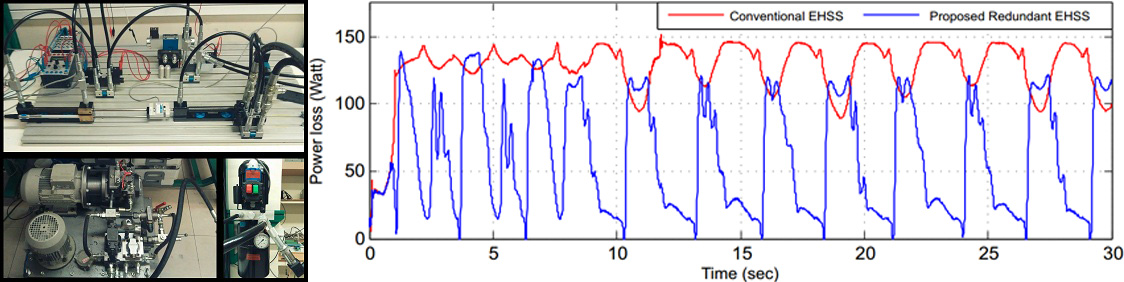
In nature, the movement of some animals is closely influenced by their environment—a form of mobility known as passive locomotion. In this mode, environmental flow (air or water) acts as propulsion, carrying the animal in the same direction. For instance, jellyfish and flatworms drift with the current, while species like the blue crab and continental-shelf fish such as plaice can sense tidal flow direction and exploit it to enhance their swimming speed. In engineering, hydraulic actuators often interact with their environment to exert forces and torques. When the external load aligns with the actuator’s intended motion, it can serve as an assistive force. This research aims to leverage such external loads as a form of assistive propulsion in position control, providing a secondary energy source that improves system efficiency. To this end, a new configuration of control valves is used to have a controllable supply pressure regulating the system pressure according to the actuator's demands. When assistive loads are present, the system pressure decreases and allows the external force to contribute to movement. A switched H-infinity control strategy is used to synthesize suitable control algorithms for position control in these different modes.
Publication
R. Bahrami, A. Tivay, K. Baghestan, S. M. Rezaei, M. Zareinejad.
(IEEE ICRoM 2016),
[IEEE
Xplore],
[PDF]
"An energy-saving robust motion control of redundant electro-hydraulic
servo
systems"